В различных литературных источниках по электроприводу приводятся самые разнообразные определения электропривода. Наиболее полное понятие представлено в ГОСТ 50369–92 «Электроприводы. Термины и определения».
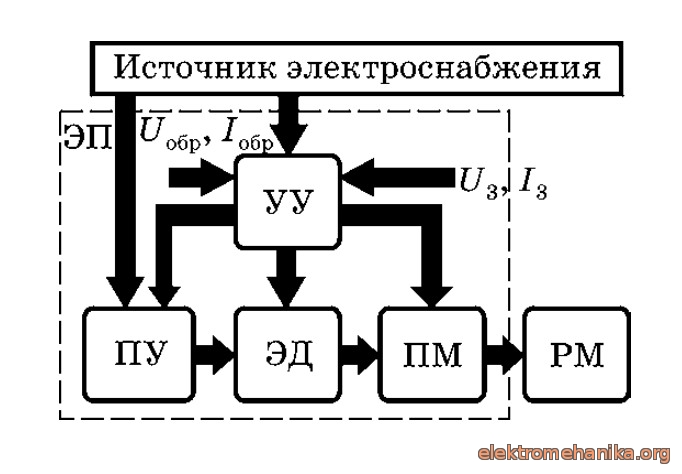
Электропривод (ЭП) — электромеханическая система, состоящая из электродвигательного (ЭД), преобразовательного (ПУ), передаточного (ПМ) и управляющего (УУ) устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления положениями координат вращающихся и возвратно поступательных элементов. Принципиальная структурная схема электропривода приведена на рисунке 1.
Основное назначение электропривода — создание полезной работы на выходном валу нагрузочной машины за счет преобразования электрической энергии в механическую.
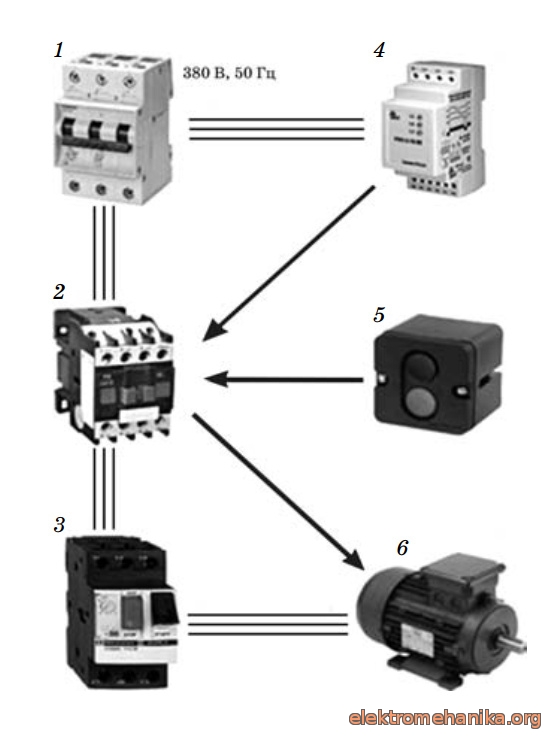
На рисунке 2 представлена упрощенная схема подключения асинхронного электрического двигателя к трехфазной сети.
В сельскохозяйственном производстве в настоящее время используется большое разнообразие электрифицированных машин и механизмов, но наиболее широкое распространение получили следующие электромеханические установки: насосные агрегаты, вентиляторы, крановые механизмы, устройства для раздачи кормов и уборки навоза, дробилки, системы сортировки и очистки семян, мобильные транспортные средства, ручной инструмент, сепараторы молока и т. д.
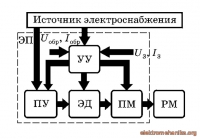
Рис. 1 Функциональная схема электро- привода:
УУ — устройство управления; ПУ — преобразовательное устройство; ЭД — электродвигатель; ПМ — передаточный механизм; РМ — рабочая машина; ЭП — электропривод.

Рис. 2 Упрощенная схема подключения асинхронного электропривода:
1 — вводной автоматический выключатель; 2 — магнитный пускатель; 3 — тепловое реле; 4 — реле контроля фаз и уровня напряжения; 5 — кнопки управления; 6 — электродвигатель.

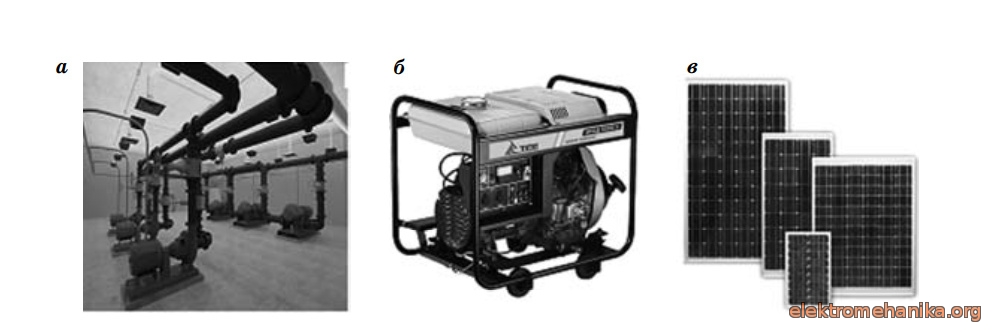
Рис. 3 Примеры источников электроснабжения:
а — подключение к сети электропривода насосного агрегата; б — дизель-генератор; в — панели солнечных батарей.
Источником электроснабжения электрического привода традиционно может быть: электрическая сеть, автономный бензо-дизель-генератор, химические аккумулирующие устройства или возобновляемые источники энергии, например панели солнечных батарей, ветроэнергетические установки, электростанции на биогазе, морские, волновые и приливные источники электроэнергии и т. д. На рисунке 3 в качестве примера представлены источники электроснабжения, относящиеся к рассмотренным группам.
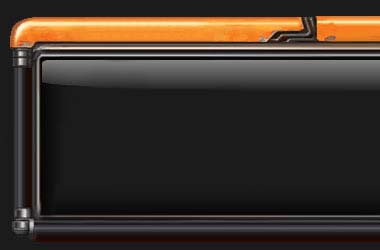
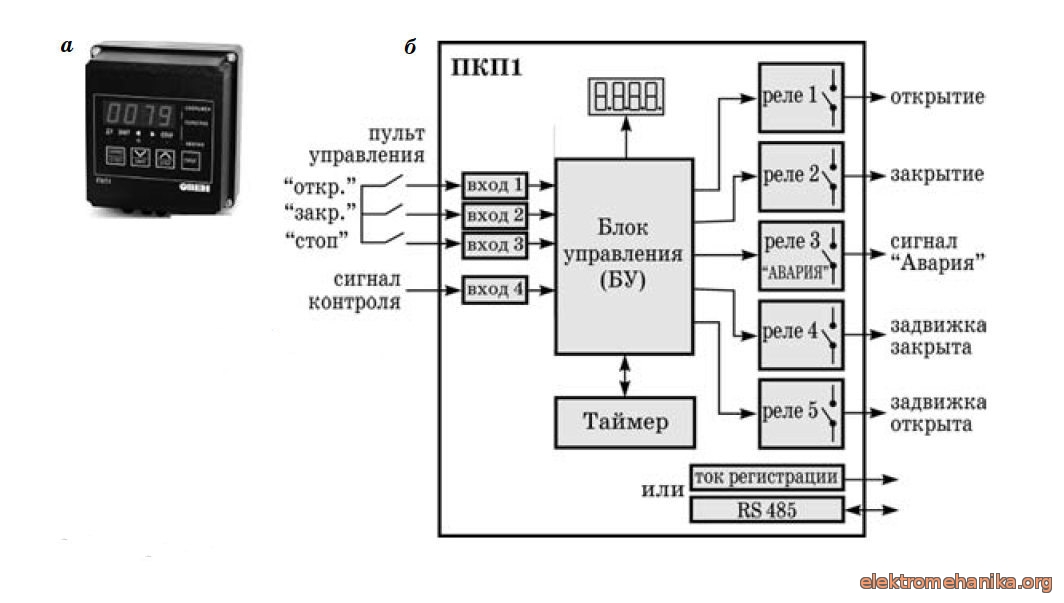
Устройство управления применяется для выработки управляющих сигналов силовой энергетической части электропривода, в состав которой входят преобразующее устройство, электрическая машина и передаточный механизм. На вход УУ поступают задающие сигналы по току или напряжению, а также импульсы обратных связей. На выходе вырабатывается необходимая функциональная зависимость управления. В состав управляющих устройств входят микропроцессорные средства и разнообразная компьютерная техника. На рисунке 4 представлено устройство управления и защиты электропривода задвижки фирмы «ОВЕН», ПКП1 и его функциональная схема. Прибор ПКП1 предназначен для управления задвижками и затворами в системе «Водоканал» и защиты их механизмов и электроприводов при заклинивании без применения концевых выключателей.
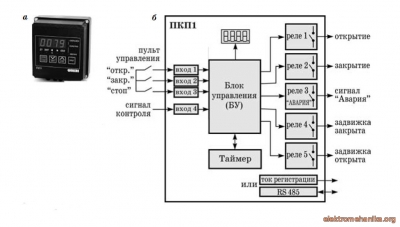
Рис. 4 Устройство управления электроприводом задвижки:
а — передняя панель прибора; б — функциональная схема микропроцессорного устройства управления ПКП1.
Преобразовательное устройство разработано для коммутации и преобразования электрических параметров на входе и выходе. ПУ способно изменять род тока, форму, амплитуду и скважность импульсов входного напряжения и тока, частоту питающей сети и регулировать обороты вращения с учетом обратных связей. В качестве преобразовательных устройств используют магнитные пускатели, контакторы, выпрямители, тиристорные коммутаторы, частотные преобразователи (ПЧ), регуляторы напряжения, устройства плавного пуска.
На рисунке 5 изображены преобразователь частоты серии ОМЕГА-2, применяемый для изменения угловой частоты вращения выходного вала электродвигателя, и принципиальная электрическая схема ПЧ на IGBT, транзисторах, обладающих более высокой частотой переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальным искажением.
Устройства плавного пуска (УПП) (рис. 6) электро - двигателей, производимые на базе тиристоров, предназначены для постепенного запуска и остановки двигателей и представляют собой тиристорное трехфазное регулирующее устройство. Пусковые устройства предназначены для работы с трехфазными асинхронными двигателями с короткозамкнутым ротором. Разработанные на элементной базе отечественных и зарубежных ведущих европейских производителей УПП позволяют мягко управлять электродвигателем, используя его в системах автоматизации.
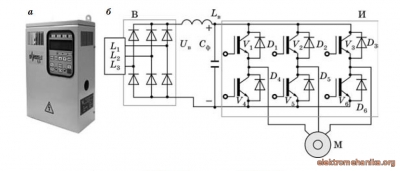
Рис. 5 Преобразовательное устройство для электропривода:
а — ПЧ для частотно регулируемых асинхронных электроприводов насосов, компрессоров, вентиляторов; б — принципиальная схема управления силовой части ПЧ с широтно-импульсной модуляцией формы токов.
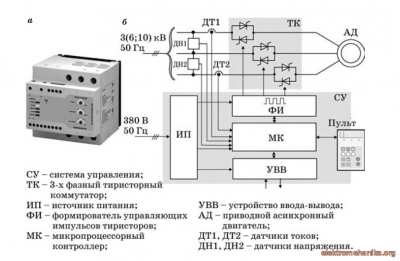
Рис. 6 Внешний вид устройства плавного пуска (а) и функциональная схема (б), совмещенная с устройством управления работой асинхронного электродвигателя.
К достоинствам систем плавного пуска следует отнести: регулировку электромагнитного момента, уменьшение пускового тока, минимизацию потерь в тиристорах, возможность каскадного запуска электрических машин одним УПП, снижение износа двигателей и редукторов, сокращение расходов на обслуживание.
Выпускаются импортные серии ESL, ATS, RSE и отечественные типа Triol, Kimo.
Электрический двигатель предназначен для непосредственного преобразования электрической энергии в механическую и наоборот. Электродвигатели подразделяются на синхронные, асинхронные и машины постоянного тока.
Наиболее широкое распространение в промышленности и сельскохозяйственном производстве получил электропривод на основе асинхронного короткозамкнутого электрического двигателя и электродвигателя с фазным ротором.
В настоящее время выпускаются общепромышленные унифицированные асинхронные электродвигатели на переменное напряжение питания 380, 660 В, с частотой тока 50 Гц. Наиболее известны серии трехфазного типа: АИ, 7АИ, 5А, 6А, и постоянного тока класса: 2П, 4П, 5П, 6П на напряжение 220, 440 В. Электродвигатели асинхронные трехфазные с фазным ротором cepий 5АНК, АК4, 6АК, АДФ предназначены для привода механизмов, требующих изменения частоты вращения. Используются в кaчecтвe пpивoдa вeнтилятopoв, дымococoв, кoмпpeccopoв, мeтaллopeжyщeгo и дpyгoгo oбopyдoвaния. Широкое распространении получили специализированные модификации двигателей, например, для крановых механизмов разработан линейный ряд MTF и MTKF. В помещениях с повышенной взрывоопасностью, высокой влажностью или агрессивной средой используют электрические двигатели специального назначения — 2В, 2ВР, ВРП. Наряду с применением электродвигателей указанных групп до сих пор эксплуатируются и ранее выпускавшиеся двигатели единой серии 4 А.
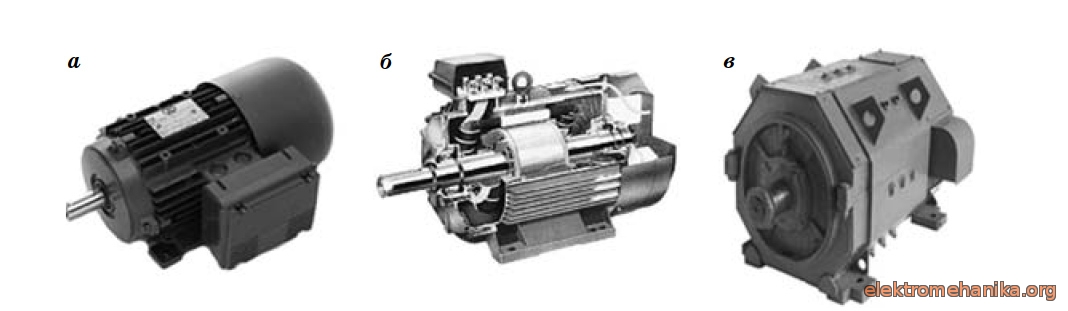
На рисунке 7 представлены фотографии внешнего вида асинхронного электродвигателя с короткозамкнутым и фазным ротором и машины постоянного тока.
Асинхронный электродвигатель обладает простотой обслуживания, повышенной надежностью, высокой наработкой на отказ, улучшенными удельными характеристиками (отношение потребляемой мощности к общему объему двигателя или к его активным материалам) по сравнению с машиной постоянного тока при одной и той же номинальной мощности.

Рис. 7 Внешний вид электродвигателей:
а — асинхронный двигатель с короткозамкнутым ротором; б — электродвигатель с фазным ротором; в — машина постоянного тока.
Передаточный механизм необходим для передачи механической энергии от электродвигателя к исполнительному органу рабочей машины и согласования вида и скоростей движения. С целью получения высокоэффективного, энергосберегающего электропривода рекомендуется выбирать электрические машины с высокими скоростями вращения 1500–3000 мин –1, что противоречит методики подбора рабочих машин. Для длительного и нормального функционирования рабочей машины в составе электропривода необходимо с точки зрения механической прочности и сохранения высокой производительности не увеличивать обороты вращения рабочего органа более чем 500 мин –1.
В качестве устранения существующего противоречия используются разнообразные передаточные устройства. Различают зубчатые, цепные, ременные передачи, вариаторы, редукторы, механические и электромагнитные муфты.
Наиболее широкое распространение в отраслях промышленности и агропромышленного комплекса находят редукторные и ременные передачи. Промышленность выпускает редукторы цилиндрические двухступенчатые типа РМ и РК, с планетарной зубчатой передачей серий МПз 300, червячные марки Ч, 2Ч, мотор-редукторы МЦ2В, М1Ц2У и вариаторы МВ. Выбор в пользу применения мотор-редуктора следует производить в случаях, когда необходим компактный привод.
В последнее время в системах автоматизированного электропривода все чаще и чаще применяются электромагнитные муфты класса ЭМ и ЭТМ. Электромагнитные муфты обеспечивают плавное регулирование передаваемого момента и частоты вращения, позволяют ограничивать крутящий момент, осуществлять плавность процесса пуска, изменять направление вращения и выполнять торможение по заданному закону.
Фрикционные пары в электромагнитных муфтах сцепляются под действием магнитного притяжения между деталями, находящимися на ведущих и ведомых частях привода. Притяжение возникает благодаря пропусканию через обмотку электромагнитного тока, создающего магнитный поток требуемой величины.

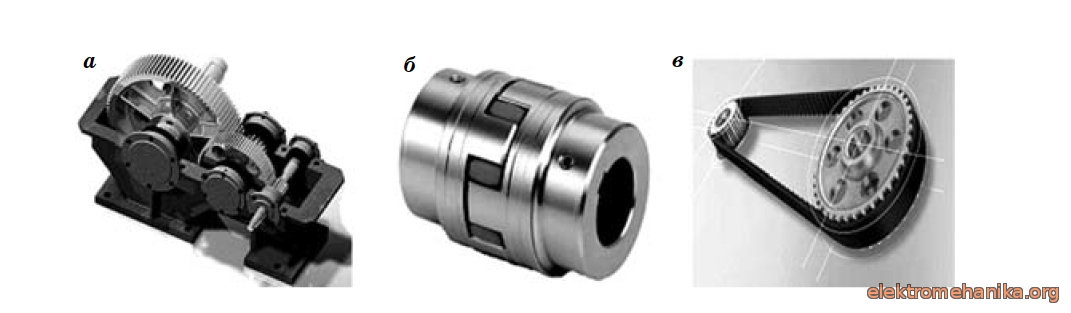
Рис. 8 Внешний вид:
а — многоступенчатого редуктора; б — электромагнитной муфты; в — зубчато-ременной передачи.

Рис. 9 Рабочие машины, применяемые в сельском хозяйстве:
а — осевой вентилятор; б — центробежный насос; в — ленточный скребковый транспортер.
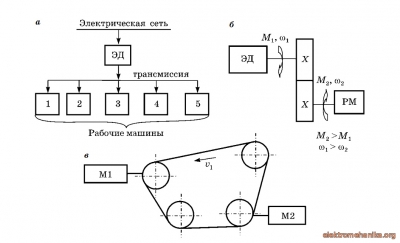
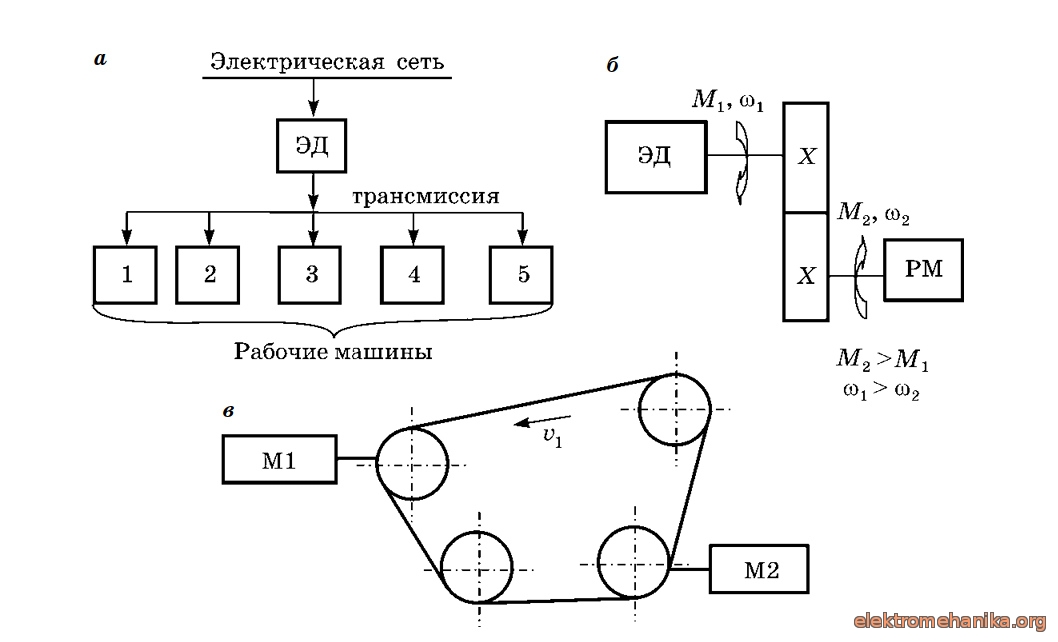
Рис. 10 Схемы электропривода:
а — групповой; б — индивидуальный; в — взаимосвязанный.
На рисунке 8 представлены фотографии многоступенчатого редуктора, электромагнитной муфты и зубчато-ременной передачи.
Рабочей машиной называется устройство, предназначенное для изменения формы, свойств, состояния и положения предмета труда. Основным элементом РМ считается исполнительный рабочий орган (РО), который предназначен для выполнения полезной работы электропривода в процессе реализации технологической операции.
На рисунке 9 изображены примеры рабочих машин, используемых в сельскохозяйственном производстве.
Классификация электропривода. В зависимости от способа передачи механической энергии от электродвигателя к рабочей машине различают групповой, индивидуальный, взаимосвязанный и многодвигательный электроприводы (рис. 10). При групповом электроприводе несколько машин приводятся в действие от одного электрического двигателя через систему передач. Коэффициент полезного действия подобной механической системы очень низок, а потребляемая мощность электродвигателя сильно завышена.
Индивидуальный электропривод имеет свою рабочую машину и сопрягается с ней либо напрямую, либо через передаточный механизм. Взаимосвязанный электропривод представляет собой два или несколько ЭП, при работе поддерживается исходя из технологического процесса требуемого соотношение скоростей вращения, нагрузок и положения исполнительных органов рабочих машин.
По принципу передачи движения и управления электроприводы подразделяются на непрерывного и дискретного, вращательного и линейного действия, реверсивные и нереверсивные, позиционные, следящие и программно - управляемые.
Различают ЭП и по роду тока и степени автоматизации. Выделяют электропривод постоянного и переменного тока, а также классифицируют на неавтоматизированный, автоматизированный и автоматический привода.
Исходя из системы электроснабжения, ЭП разделяют на сетевой, подключаемый к централизованной системе электроснабжения, и автономный электропривод, потребляющий энергию от бензо-дизель-генераторов, аккумуляторных батарей и возобновляемых источников энергии.
По характеру изменения параметров разграничение происходит на регулируемый ЭП, характеристики которого могут варьироваться под воздействием управляющего устройства, и нерегулируемый. У последнего обороты вращения ротора, нагрузка, диапазон регулирования, жесткость механических характеристик и электромеханическая постоянная времени способны отклоняться от стандартных значений только под действием возмущающих факторов.
Вследствие возможной связи с передаточным механизмом электрический привод подразделяется на редукторный и безредукторный и электропривод со встроенным в одном корпусе червячным ПМ, благодаря особенностям конструкции называемый мотор-редуктор.
В сельскохозяйственном производстве наиболее широкое распространение получил индивидуальный автоматизированный электропривод с асинхронными электродвигателями, имеющими повышенную степень защиты от влияния внешней среды, мощностью до 200 кВт, с синхронными частотами вращения от 750 до 3000 мин –1, приводящий в движение рабочий орган через редуктор, ременную или цепную передачу.
|