Электропривод постоянного тока
Машины постоянного тока
Электродвигатели постоянного тока применяют в тех электроприводах, где требуется большой диапазон регулирования скорости, высокая точность поддержания оборотов вращения привода и регулирования угловой частоты вращения вверх и вниз от номинальной.Двигатели постоянного тока (ДПТ) состоят из четырех основных частей: статора, обмотки возбуждения (ОВ), якоря с обмоткой и щеточно-коллекторного узла, необходимого для подведения напряжения к якорной обмотке.
При этом щетки неподвижны, а коллектор жестко связан с якорем.
На рисунке 1 дано трехмерное изображение конструкции машины постоянного тока.
В ДПТ для улучшения условий коммутации могут быть также предусмотрены и дополнительные полюса, а для компенсации поперечной реакции якоря — компенсационные обмотки на полюсах статора.

Рис. 1 Разрез конструкции машины постоянного тока:
1 — вал; 2, 9 — подшипниковые щиты; 3 — коллектор; 4 — щеткодержатели; 5 — магнитопровод якоря; 6 — сердечник главных полюсов; 7 — катушка с обмоткой возбуждения; 8 — станина; 10 — вентилятор; 11 — бандаж; 12 — лапы станины; 13 — подшипник.
В зависимости от способа электромагнитного возбуждения, машины постоянного тока подразделяют на двигатель постоянного тока с независимой обмоткой возбуждения (ДПТ НВ), с параллельной обмоткой возбуждения (ДПТ ПВ), последовательного и смешанного возбуждения.
Наибольшее распространение получили двигатели комбинированного параллельно-последовательного возбуждения и машины постоянного тока с последовательной обмоткой возбуждения.
В сельскохозяйственном производстве двигатели постоянного тока находят применение в металлорежущих станках, вентиляционных установках, в электрокарах, в электротрансмиссиях тракторов и автомобилей большой мощности, в ручном электрифицированном инструменте и т. д.
Механические характеристики электродвигателей
Одним из обязательных условий производительной, надежной и экономичной работы нагрузочной машины является правильный выбор электропривода. Выбранный электропривод должен обеспечивать благоприятную работу исполнительного органа в статическом и динамическом режимах.
Запуск электрической машины, переход с одной скорости на другую, сброс нагрузки и торможение производственного механизма — это процессы, которые определяются характером изменения тока, скоростью вращения и электромагнитного момента.
Связь между угловой частотой вращения двигателя и развиваемым им моментом называется механической характеристикой электродвигателя, ω= f(М) или n = f(М), а зависимость оборотов вращения от тока определяется как электромеханическая характеристика, ω= f(I) или n = f(I).
Механические характеристики, построенные по паспортным данным двигателя, называются естественными.
Характеристики, полученные в результате изменения одного или нескольких номинальных параметров, называются искусственными.
Естественные и искусственные механические характеристики различаются по степени изменения скорости вращения электродвигателя в процессе роста момента нагрузки. Данное изменение называется жесткостью механических характеристик.
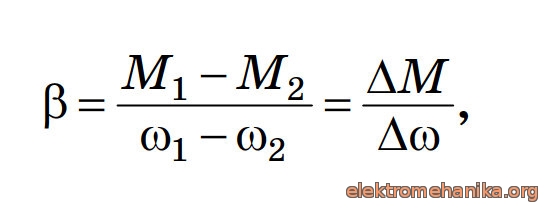
Под жесткостью механических характеристик понимается разность между электромагнитными моментами двигателя, отнесенная к разности угловых скоростей вращения.
Критерием для оценки графических зависимостей обычно служит их крутизна:

где М1, М2 — электромагнитные моменты; ω1, ω2 — угловые частоты вращения.
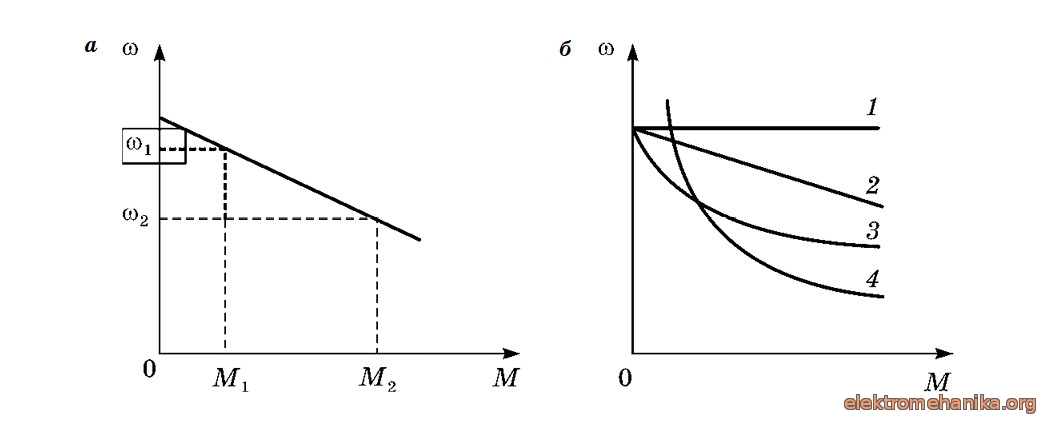
На рисунке 2 представлены механические характеристики электродвигателей.
Выбор характеристик определяется требованиями производственного механизма и технологического процесса.
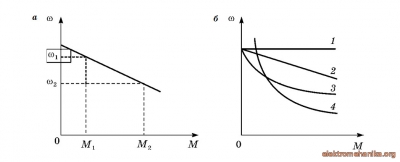
Рис. 2 Механические характеристики электродвигателей:
а — иллюстрация к определению жесткости; б — механические характеристики электродвигателей: 1 — абсолютно жесткая синхронного вентильного двигателя; 2 — жесткая двигателя постоянного тока независимого возбуждения; 3 — мягкая двигателя постоянного тока смешанного возбуждения; 4 — мягкая двигателя постоянного тока последовательного возбуждения.
Механические и электромеханические характеристики двигателя постоянного тока параллельного и независимого возбуждения
Механической характеристикой машины постоянного тока с параллельной или независимой обмоткой возбуждения называется функциональная зависимость между угловой частотой вращения якоря и электромагнитным моментом при постоянстве тока возбуждения и магнитно- го потока в электродвигателе, ω = f(M).
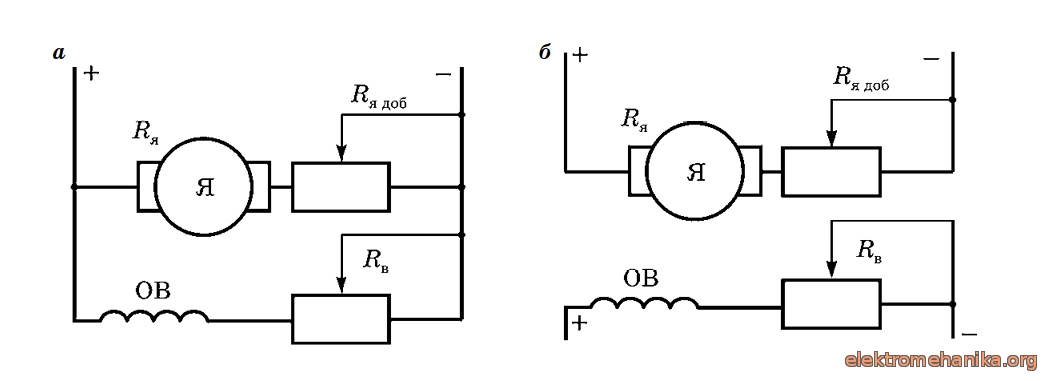
Электромеханической характеристикой считается взаимосвязь между скоростью вращения электродвигателя и током, протекающим по цепи якоря, ω = f(Iя), полученная при постоянном напряжении сети и неизменном сопротивлении обмотки возбуждения.Механические и электромеханические характеристики двигателя постоянного тока с независимым возбуждением аналогичны характеристикам электродвигателя параллельного возбуждения при постоянстве напряжения питания на обмоточных выводах последнего.На рисунке 2 представлены схемы подключения двигателя постоянного тока с параллельной и независимой обмоткой возбуждения и дополнительными резисторами в электрических цепях.
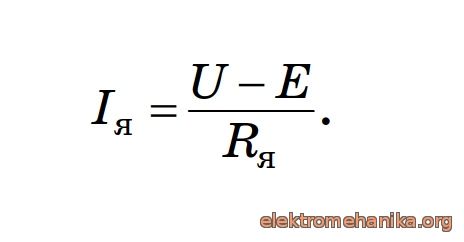
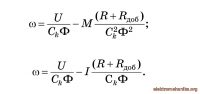
Математически выражение механической характеристики ДПТ может быть получено из уравнения баланса напряжений:
где U — напряжение питания; E — ЭДС якорной обмотки; Iя — ток в обмотке якоря; Rя — сопротивление обмотки якоря.
Ток, протекающий в обмотке якоря, вычисляется из уравнения (2)
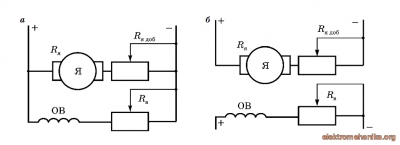
Рис. 3 Схемы подключения ДПТ с параллельной (а) и независимой (б) обмоткой возбуждения
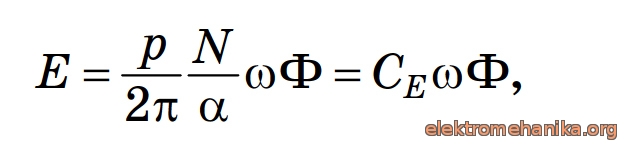
Если ЭДС электродвигателя выразить через угловую скорость и магнитный поток, получим

где р — количество пар полюсов двигателя; N — число активных проводников обмотки якоря; ω — количество параллельных ветвей обмотки якоря; Ф — магнитный поток одного полюса; ω — угловая частота вращения якоря; CE — конструктивная постоянная якорной обмотки.
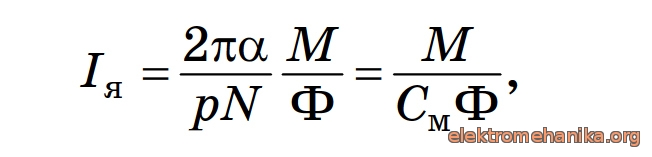
Ток якоря можно рассчитать через магнитный поток и электромагнитный момент:
где М — электромагнитный момент; См — конструктивный коэффициент двигателя.
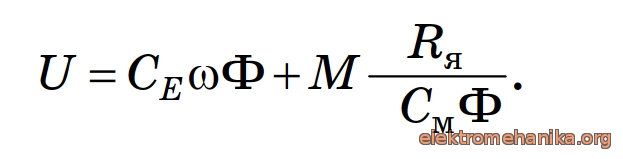
В результате подстановки уравнений (4) и (5) в (2) выводится математическое выражение, связывающее между собой напряжение питания, угловую частоту вращения якоря, электромагнитный момент и магнитный поток:
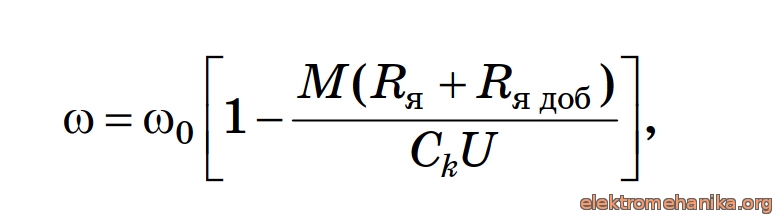
Выражая из (6) угловую частоту вращения, получим уравнение механической характеристики ДПТ НВ:
Из равенств (4) и (5) видно, что коэффициенты CE и Cм, определяемые конструктивными параметрами машин постоянного тока, практически равны между собой:
С учетом (8) уравнение (7) приводится к виду

Сопротивление якоря вычисляется по паспортным данным электродвигателя:
где U ном — номинальное напряжение сети; I ном — номинальный ток двигателя;  ном — номинальный КПД электродвигателя. ном — номинальный КПД электродвигателя.
Для расчета механических характеристик необходимо определить частоту вращения идеального холостого хода, когда ток якоря равен нулю (Iя = 0):
где ω ном — угловая частота вращения якоря в номинальном режиме работы ДПТ.
Угловая частота вращения ротора в номинальном режиме находится из выражения
где n ном — обороты вращения якоря в номинальном режиме работы.
Номинальный момент электродвигателя
где P ном — номинальная мощность двигателя.
Для вывода электромеханической характеристики двигателя постоянного тока с параллельной и независимой обмоткой возбуждения достаточно в уравнение (2) подставить выражение (4):

Из формулы (14) определяется зависимость между параметрами ω и Iя:

Выражение (15) называется уравнением электромеханической характеристики ДПТ НВ.
С учетом угловой частоты вращения при работе электродвигателя в режиме холостого хода уравнение (15) переписывается так:
В соответствии с (7) и (15) механическая и электромеханические характеристики ДПТ НВ представляют собой линейную функциональную зависимость, связывающую между собой скорость вращения, электромагнитный момент и электрический ток.
Для построения рассматриваемых характеристик в различных режимах работы электродвигателя достаточно знать координаты двух точек.Механическая характеристика для номинального режима работы строится по следующим данным: М = 0, ω = ω0 — первая точка, откладываемая на оси ординат, и М = Мном, ω = ωном — координаты второй точки, необходимой для построения линейной функции.Электромеханическая прямая рассчитывается исходя из двух режимов работы электродвигателя — идеального холостого хода и короткого замыкания. Уравнение описывает прямую линию, пересекающую оси декартовой системы координат в точках: 1 — с координатами М = 0, ω = ω0, 2 — со значениями ω = 0, Iя = Iпуск.
На рисунке 4 представлены механическая и электромеханическая характеристики ДПТ НВ для двух режимов работы.

Рис. 4 Механическая (а) и электромеханическая (б) характеристики ДПТ НВ
Угловую скорость вращения двигателя постоянного тока рекомендуется регулировать следующими способами:
- ослаблением магнитного потока или увеличением напряжения на якоре для изменения оборотов вращения выше номинальных значений;
- введением в электрическую цепь якоря дополнительных сопротивлений с целью снижения скорости вращения;
- комбинированным подключением переменных сопротивлений — последовательно и параллельно якорной обмотке для получения жестких механических характеристик.
У машины постоянного тока мощностью до 0,5 кВт сопротивление якоря в относительных единицах варьирует Rя = 0,12–0,17, поэтому пусковой ток при номинальном напряжении сети в 6–8 раз превышает номинальный и электродвигатель запускается напрямую от сети.Более мощные машины постоянного тока имеют диапазон относительных активных сопротивлений в пределах Rя = 0,1–0,02.Пусковой ток якоря может превышать номинальный в 10–50 раз, поэтому запуск без наличия дополнительных сопротивлений недопустим. Ограничение пускового тока в момент запуска ДПТ связано со значительным снижением напряжения сети, появлением большого кратковременного электромагнитного момента и, как следствие, опасного для механических соединений динамического удара, а также с высоким насыщением в добавочных полюсах, что ухудшает коммутацию и ведет к подгоранию коллекторных пластин и износу щеток.
Способы регулирования оборотов вращения ДПТ с параллельной и независимой обмоткой возбуждения
Из анализа уравнения (9) вытекает, что обороты вращения электродвигателя постоянного тока с независимой или параллельной обмоткой возбуждения можно регулировать тремя способами: изменением сопротивления цепи якоря Rя, координированием магнитного потока полюсов Ф, варьированием напряжения на зажимах якорной обмотки U.
Регулирование угловой частоты вращения ДПТ изменением сопротивления цепи якоря достигается за счет введения добавочного переменного резистора (рис. 5).
Механическая характеристика рассчитывается по формуле
где Rя — добавочное сопротивление якоря.
Сопротивление добавочно- го резистора Rя доб = var рекомендуется изменять ступенчато или плавно в зависимости от требований технологического процесса и особенностей работы нагрузочного механизма, а сопротивление регулировочного резистора в цепи ОВ следует поддерживать постоянным, Rв = const.
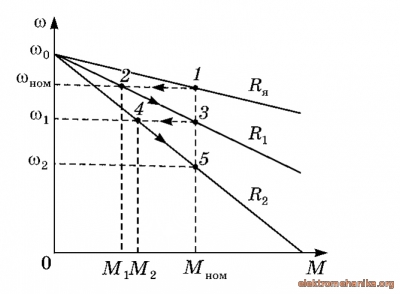
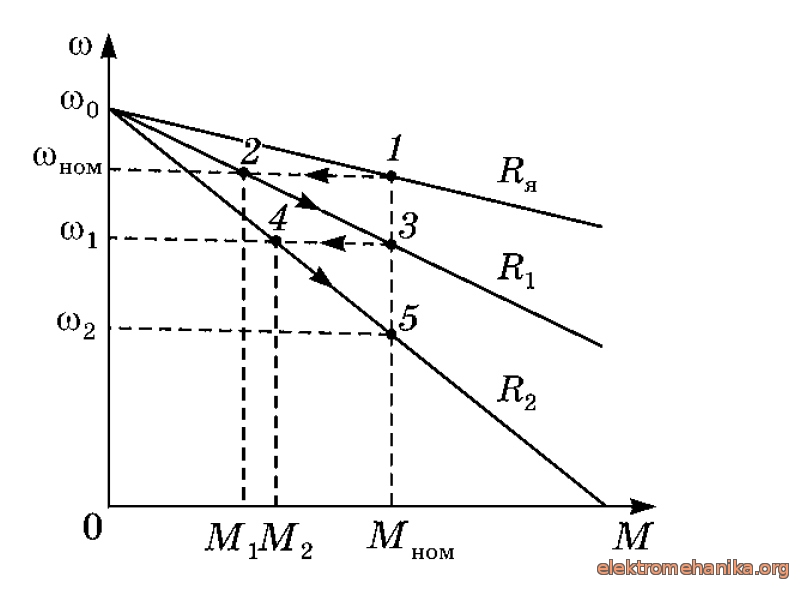
Рис. 5 Регулирование угловой частоты вращения изменением сопротивления в цепи якоря: R2 > R1 > Rя
На рисунке 5 представлены механические характеристики ДПТ НВ.
Механическая характеристика, построенная по номинальным данным, называется естественной механической характеристикой. На рисунке 5 она обозначена как Rя.
Прямые R1 и R2 построены с учетом ввода добавочного резистора и называются искусственными механическими характеристиками. С ростом добавочного сопротивления в цепи якоря наклон характеристик увеличивается, а диапазон регулирования составляет 3–4 от ωном в сторону понижения.
Анализ электромеханического процесса изменения скорости электропривода, работающего в точке 1 на естественной механической характеристике, с параметрами: Rд = 0, ω = ωном, Mном = Mс выглядит следующим образом.
Если в цепь якоря вводится дополнительный резистор, то работа электропривода переходит из точки 1 в точку 2.
Точка 1 обозначена на естественной механической характеристике Rя, а точка 2 изображена на искусственной прямой R1. Переход выполняется без изменения оборотов вращения якоря за счет наличия большого момента инерции электропривода, но с меньшим электромагнитным моментом M1. Снижение электромагнитного момента объясняется уменьшением тока якоря после введения в электрическую цепь дополнительного резистора. Поскольку M1 < < Mc, вращение всех подвижных частей электропривода замедляется, уменьшается ЭДС, а ток якоря и момент начинают возрастать (отрезок [2, 3]). Когда в точке 3 вращающий момент по величине сравняется с моментом сопротивления, угловая скорость вращения двигателя снижается до ω1 (ω1 < ωном). При Mc = const ток якоря достигает прежнего значения, а потребляемая мощность не изменяется.
Дальнейшее увеличение сопротивления добавочного резистора приводит к тому, что работа машины постоянного тока аналогично рассмотренному процессу по искусственным механическим характеристикам R1 и R2 переходит из точки 3 в точку 4, а затем в точку 5, в которой обороты вращения якоря спадают до ω2 (ω2 < ω1 < ωном). В процессе переходного периода механическая мощность Pмех и КПД электродвигателя резко уменьшаются.
К недостаткам данного способа регулирования относятся большие потери мощности в добавочном резисторе, а также возможное снижение механической мощности электродвигателя до 50%, когда обороты якоря достигают половины ω0.
Изменение оборотов вращения якоря вследствие регулирования магнитного потока полюсов. Данный способ основывается на вводе добавочного резистора Rв в обмотку возбуждения (рис. 3) или подключении к концевым зажимам регулируемого источника напряжения. Процесс повышения или понижения оборотов вращения происходит в следующем порядке. Предполагается, что сопротивление добавочного резистора Rя доб остается величиной неизменной, а сопротивление Rв в цепи обмотки возбуждения варьируется. В результате ток возбуждения Iв и магнитный поток Ф изменяются по заданному закону.
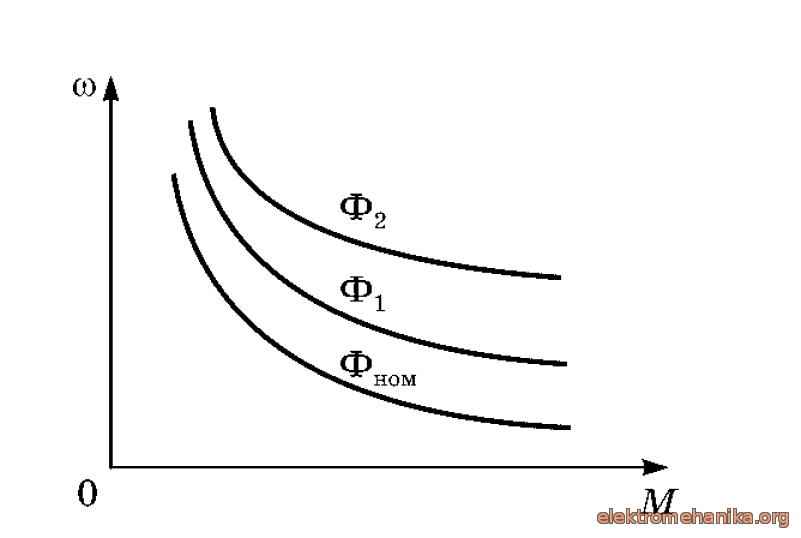
Увеличение сопротивления в цепи ОВ приводит к снижению тока возбуждения и магнитного потока. Уменьшение магнитного потока Ф дает возможность повысить скорость идеального холостого хода ω0, сохранив неизменным пусковой ток Iпуск (ток короткого замыкания) электродвигателя. На рисунке 6 даны естественная и искусственные электромеханические характеристики ДПТ НВ.
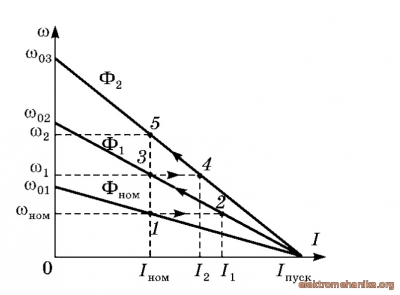
Рис. 6 Электромеханические характеристики, построенные в результате изменения магнитного потока
Переходный процесс в результате ввода в ОВ дополнительного сопротивления протекает следующим образом.
Из точки 1, обозначенной на естественной электромеханической характеристике Фном ДПТ независимого возбуждения, из-за резкого скачка тока якоря I1, вызванного ослаблением магнитного потока об- мотки, возбуждение переходит в точку 2, изображенную на искусственной характеристике Ф1. Переход, протекающий при неизменной номинальной угловой скорости вращения, сопровождается снижением ЭДС и увеличением электромагнитного момента (M1 > Mc), который становится намного больше момента сопротивления. В результате ослабления магнитного потока основных полюсов электродвигателя и постепенного нарастания ЭДС ток обмотки якоря начинает уменьшаться (отрезок [2, 3]), а обороты — расти. В точке 3 угловая скорость вращения привода достигает установившегося значения ω1 (ω1 > ωном), а электромагнитный момент и ток якоря становятся равными номинальному току и первоначальному моменту сопротивления (Mном = Mс). Работа электропривода продолжается в новом режиме, который характеризуется номинальными значениями тока якоря и электромагнитного момента и более высокими оборотами вращения. Дальнейшее увеличение сопротивления в обмотке возбуждения вызывает снижение магнитного потока полюсов Ф2 и очередной скачок тока I2 в обмотке якоря. Переходный процесс протекает аналогично рассмотренному на искусственных механических характеристиках Ф1 и Ф2 по цепочке: точки 3 → 4 и 4 → 5. В конце переходного периода угловая скорость достигает значения ω2 (ω2 > ω1 > ωном). Анализ изучаемых характеристик показывает: снижение тормозного момента электродвигателя за счет понижения магнитного потока Ф2 < Ф1 < Фном в цепи обмотки возбуждения приводит к росту угловой частоты вращения в режиме холостого хода: ω03 > ω02 > ω01.
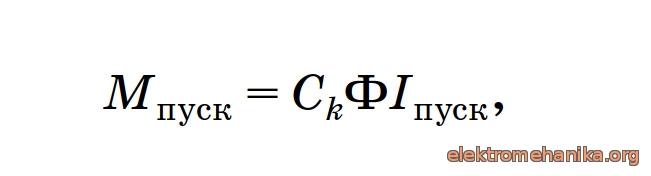
Пусковой электромагнитный момент рассчитывается по формуле
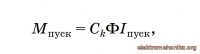
где Iпуск — пусковой ток ДПТ.
Из выражения (18) следует, что если величина пускового тока неизменна (Iпуск = const), то в результате ослабления магнитного потока (Ф → 0) уменьшается и пусковой момент электродвигателя (Mпуск → 0).
Механические характеристики машины постоянного тока с независимой обмоткой возбуждения показаны на рисунке 7.
Рис. 7 Механические характеристики ДПТ НВ
Рассматриваемый способ регулирования является экономичным, так как потери мощности в якоре минимальны и постоянны:
ΔPя ≈ const.Диапазон изменения направлен в сторону повышения скорости вращения якоря и может достигать 2–3 значений выше ωном. Пусковой момент уменьшается пропорционально магнитному потоку.
Ток короткого замыкания ограничивается условиями коммутации на якоре и не должен превышать (2–4) Iном.
Регулирование скорости изменением магнитного потока происходит при постоянной мощности ДПТ или по условию нагрева допускается при токах, не превышающих номинальное значение.
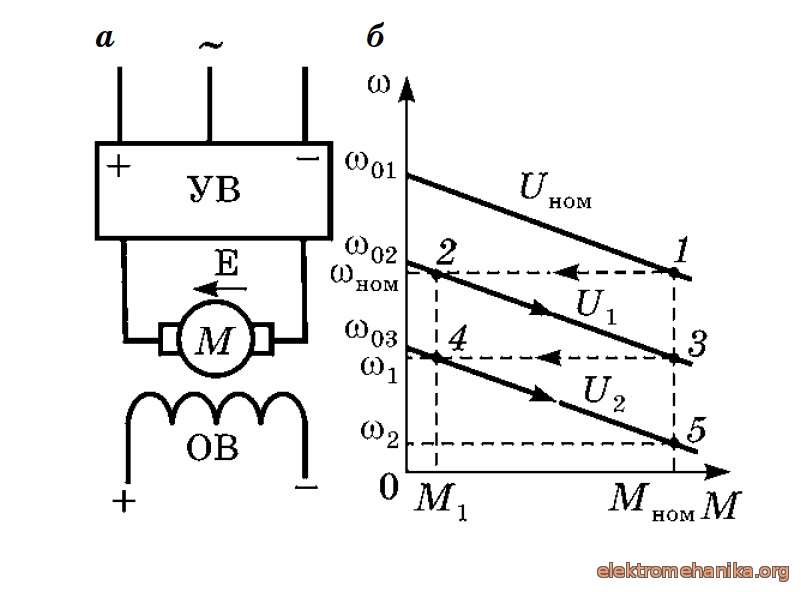
Регулирование оборотов вращения якоря с помощью напряжения питания якорной обмотки. Реализация способа предусматривает подключение обмотки якоря к преобразователю напряжения, выходные параметры которого могут меняться как плавно, так и ступенчато.
В двигателе параллельного возбуждения частота вращения холостого хода изменяется пропорционально изменению напряжения. Регулирование оборотов вращения идет вниз от номинального значения.
Наиболее распространенным техническим устройством для этих целей служит управляющий выпрямитель (УВ).
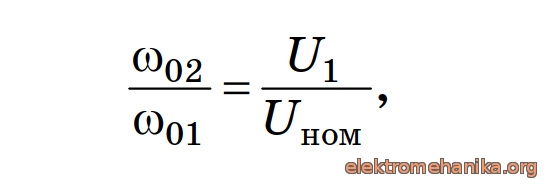
Соотношение между угловыми частотами вращения и напряжением, подаваемым на обмотку якоря, вытекает из равенства
где Uном и U1 — напряжения, подаваемые на обмотку якоря, Uном > U1; ω01 и ω02 — угловые частоты вращения в режиме холостого хода, ω01 > ω02. Из выражения (19) определяется скорость вращения ω02:
На рисунке 8 представлены схема управления и механические характеристики ДПТ НВ при регулировании напряжения на зажимах якоря.Работу электропривода в переходном процессе возможно описать, исходя из графиков на рисунке 8б.
В первоначальный момент времени двигатель работает в номинальном режиме на естественной механической характеристике Uном в точке 1 (Mc = Mном). С уменьшением напряжения на выводах обмотки уменьшается ток в цепи якоря и, следовательно, электромагнитный момент ДПТ. Момент сопротивления мгновенно становится намного больше электромагнитного момента двигателя (Mс > > M1). Переход из точки 1, обозначенной на естественной механической характеристике, в точку 2, изображенную на искусственной U1, вызывает появление тормозящего динамического момента Mд = M1 – Mc < 0. В результате ток якоря и электромагнитный момент двигателя возрастают, а обороты вращения непрерывно уменьшаются (отрезок [2, 3]). Процесс торможения постепенно затухает, а угловая скорость спадает до ω1 (ω1 < ωном). По истечении переходного периода в точке 3 устанавливается равенство между моментами, Mном = Mc.
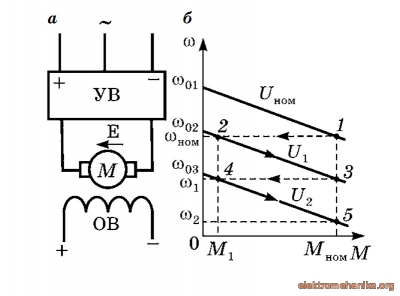
Рис. 8 Схема управления ДПТ НВ (а), механические характеристики (б), полученные в результате изменения напряжения, Uном > U1 > U2
Последующее снижение напряжения заставляет электродвигатель работать на искусственных механических характеристиках U1, U2 и перейти вначале в точку 4, а затем в точку 5. В новом установившемся состоянии электропривода угловая скорость вращения якоря снижается до значения ω2 (ωном > ω1 > ω2), а электродвигатель переходит в очередной режим работы.
Рассмотренный способ регулирования требует довольно сложного и дорогостоящего оборудования, несмотря на это, его широко применяют в современных электроприводах, поскольку он обеспечивает плавное и экономичное регулирование скорости в широких пределах. Диапазон изменения скорости вращения якоря составляет (8–10) ωном вниз от номинальной, при этом жесткость механических характеристик β и потери мощности в якоре ΔPя постоянны.
Анализируя режимы работы двигателя постоянного тока с параллельной и независимой обмоткой возбуждения, можно отметить основные свойства, которыми обладает электропривод, в состав которого входит исследуемая машина.
При помощи переменных резисторов, включенных в цепь якоря, легко ограничивать пусковой ток и момент короткого замыкания, и тем самым снижать вероятность появления динамических ударов в механической части электропривода; в широком диапазоне уменьшать обороты вращения якоря и, как следствие, производительность электропривода при наличии момента сопротивления на валу электродвигателя, например, в виде насоса, вентилятора, металлорежущих станков, загрузочных устройств агрегатов витаминной муки и т. д. Регулируя в обмотке возбуждения величину магнитного потока в сторону его снижения, можно повышать скорость вращения рабочего органа механического устройства и тем самым эффективность его работы.
Используя управляемый преобразователь напряжения можно понижать потери мощности, возникающие в процессе регулирования скорости вращения, а также получить стабилизацию оборотов на каждой линейной зависимости, поскольку получаемое семейство искусственных механических характеристик обладает постоянной величиной жесткости.
Механические и электромеханические характеристики двигателя постоянного тока последовательного возбуждения
Машины данного типа отличаются от ДПТ НВ тем, что обмотка возбуждения подключается последовательно якорной, а магнитный поток является функцией тока, протекающего в последовательном соединении элементов электрической цепи. Особенность работы двигателя постоянного тока последовательного возбуждения заключается в том, что при изменении нагрузки на выходном валу обороты вращения изменяются не только в результате роста или уменьшения магнитного потока, но и за счет падения напряжения в цепи якоря. С ростом нагрузки и тока якоря магнитный поток возрастает, а угловая скорость вращения падает. В результате механические и электромеханические характеристики ДПТ ПВ имеют значительную крутизну и по форме напоминают гиперболу. Способность двигателей последовательного возбуждения развивать большой электромагнитный момент, пропорциональный квадрату тока якоря (M = α CR I2), обеспечивает хорошие пусковые свойства. Пусковой момент достигает максимальных значений при сравнительно малом токе якоря.
Электродвигатель применяется для привода вентиляторов, электрического транспорта и подъемных устройств.
Наличие мягкой механической характеристики у двигателя постоянного тока последовательного возбуждения приводит к автоматическому снижению оборотов в момент увеличения нагрузки на валу, например, подъем в гору и увеличение скорости при снижении сопротивления, когда движение происходит по равнине.
Во всех режимах работы ДПТ ПВ механические и электромеханические характеристики получаются мягкими.
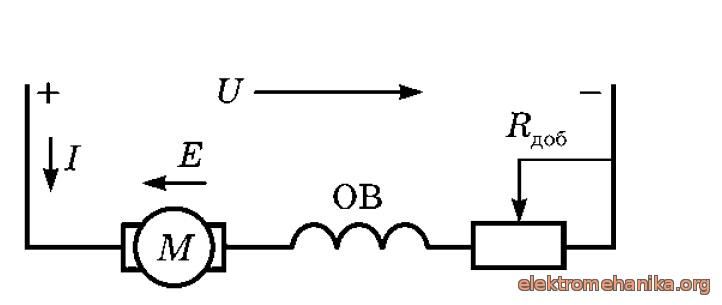
Если М = 0, то угловая скорость теоретически возрастает до бесконечности, ω → ∞. Во избежание разрушения конструкции под действием центробежных сил электродвигатель нельзя эксплуатировать в режиме холостого хода и с нагрузкой менее 25% от номинальной. На рисунке 9 представлена схема подключения машины постоянного тока с последовательной обмоткой возбуждения.
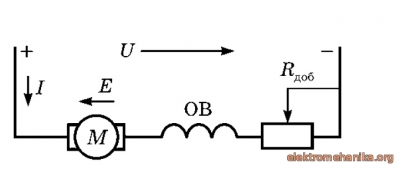
Рис. 9 Схема подключения двигателя постоянного тока с последовательной обмоткой возбуждения
Механической характеристикой двигателя последовательного возбуждения называют зависимость угловой частоты вращения от электромагнитного момента.Под электромеханической характеристикой понимается функциональная связь между оборотами вращения якоря и током, протекающим по обмоткам последовательной электрической цепи.Механическая и электромеханическая характеристики ненасыщенного ДПТ с последовательным возбуждением имеют гиперболический характер.
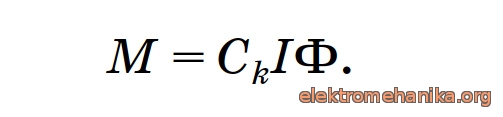
Электромагнитный момент двигателя прямо пропорционален току и магнитному потоку и находится так:
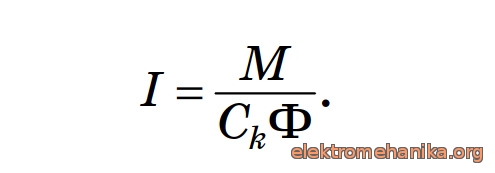
Из выражения (21) определяется ток последовательной цепи, состоящей из якорной обмотки и обмотки возбуждения:
Подставляя (22) в (15), одновременно заменяя в нем ток якоря Iя на I, а Rя на R, получим формулу для расчета механической характеристики:
где R — суммарное активное сопротивление цепи, R = = Rя+Rв; Rв — активное сопротивление обмотки возбуждения.
Для вывода уравнения электромеханической характеристики в выражение (23) подставляется (21):
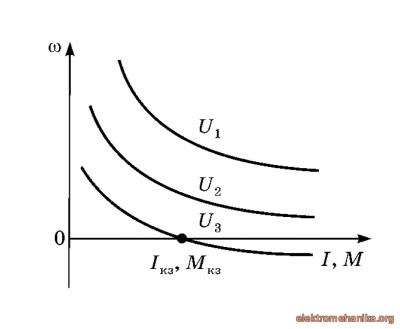
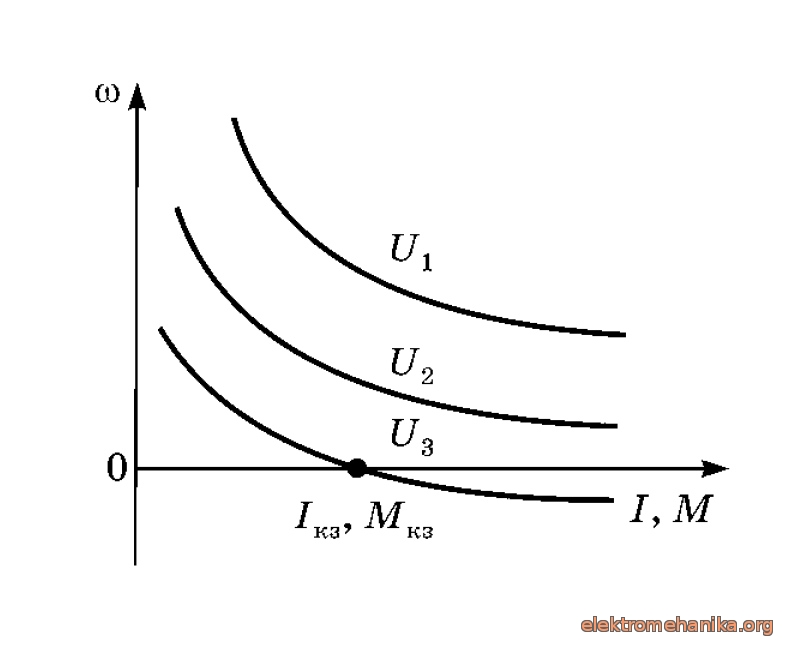
Рис. 10 Механические и электромеханические характеристики ДПТ ПВ:
U1 — естественная; U2, U3 — искусственные характеристики, U1 > U2 > U3.
Выражение (22) связывает между собой скорость вращения ДПТ ПВ с током и называется уравнением электромеханической характеристики.Для получения искусственных механических и электромеханических характеристик в формулы (23) и (24) добавляются переменные сопротивления, тогда
На основании системы уравнений (25) строится семейство характеристик (рис. 10).
С ростом нагрузки на валу электродвигателя, работающего по основной схеме включения, резко возрастают ток и электромагнитный поток, вызывающие появление тормозного момента и снижение оборотов вращения, поэтому машины постоянного тока с последовательной обмоткой возбуждения применяются в электроприводах с частыми и тяжелыми пусками, у которых не предусматривается периодического сброса нагрузки.Для двигателя постоянного тока с последовательной обмоткой возбуждения существуют два периода работы: двигательный и противовключения (рис. 10, первый и четвертый квадранты декартовой системы координат), и не существуют режимы холостого хода и генераторного торможения.
Регулирование скорости вращения двигателя постоянного тока последовательного возбуждения
Регулирование скорости ДПТ ПВ может осуществляться: введением в электрическую цепь дополнительного сопротивления, изменением магнитного потока и подводимого напряжения, шунтированием обмотки якоря и применением импульсных источников питания.Снижение скорости вращения с помощью переменного резистора в цепи обмотки якоря. Реализация предлагаемого способа основывается на введении в последовательно соединенную электрическую цепь, состоящую из двух обмоток, переменного резистора (cм. рис. 9). Передвижение подвижного контакта резистора в сторону максимума приводит к повышению суммарного активного сопротивления R цепи, снижению тока I и магнитного потока (Ф = С1I) и, как следствие, к увеличению скорости вращения якоря. В результате добавочного падения напряжения на пусковом резисторе искусственные механические и электромеханические характеристики располагаются ниже кривой, построенной по паспортным данным электродвигателя (рис. 10). Данный способ регулирования отличается простотой реализации и не требует дорогостоящих автоматических систем управления. Диапазон снижения угловой частоты вращения изменяется в пределах (2–3) ωном. По мере роста Rдоб работа двигателя может перейти в режим короткого замыкания, что соответствует нулевой угловой частоте вращения.
Недостатками способа управления считаются дополнительные потери мощности на добавочном сопротивлении, низкая точность установления требуемых оборотов вращения и кратковременный режим работы на пониженных скоростях.
Изменение оборотов вращения якоря ДПТ ПВ магнитным потоком. На рисунке 11 дана схема подключения двигателя постоянного тока последовательного возбуждения с шунтирующим ОВ переменным резистором. Последовательно-параллельное соединение электрической цепи приводит к тому, что часть тока якоря протекает по шунтирующему резистору Rш, в результате ток обмотки возбуждения Iв и магнитный поток Ф уменьшаются, а скорость вращения двигателя увеличивается.
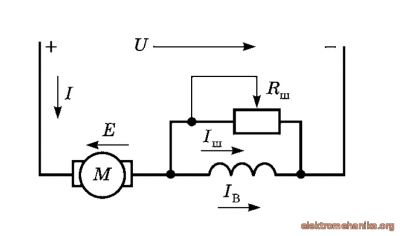
Рис. 11 Схема подключения ДПТ ПВ с шунтирующим обмотку возбуждения резистором
Регулирование угловой частоты вращения осуществляется в сторону увеличения от ωном, поэтому искусственные механические характеристики располагаются выше естественной (рис. 12).
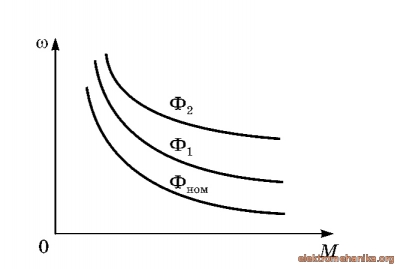
Рис. 12 Естественная и искусствен- ные механические характеристики ДПТ ПВ с шунтированием обмотки возбуждения,
Фном > Ф2 > Ф1
Ослабление магнитного потока происходит при постоянном значении напряжения питания электродвигателя.
Если ползунок переменного резистора выведен на максимум, то электродвигатель оказывается включенным по своей основной схеме и работает на номинальной скорости вращения. При установлении шунтирующего сопротивления на минимум ДПТ ПВ достигает максимальной скорости вращения якоря.
Ток в обмотке возбуждения рассчитывается из уравнения
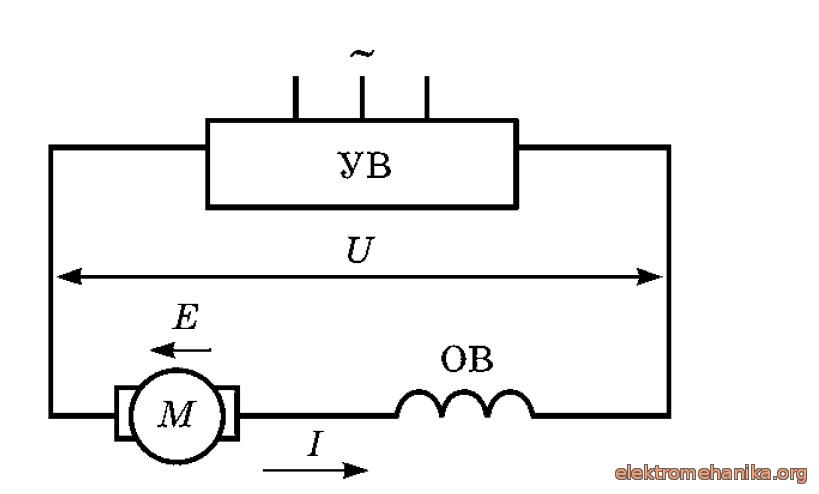
Регулирование оборотов вращения якоря с помощью изменения напряжения питания. Электродвигатель подключается к управляемой схеме, например, тиристорному выпрямителю, у которого выходное напряжение регулируется в зависимости от величины сигнала Uу, подаваемого на управляющий электрод. Если к обмоткам подводится номинальное напряжение, то двигатель работает на естественной механической характеристике. Уменьшение напряжения переводит работу ДПТ ПВ на искусственные механические характеристики. Кривые на графике проходят ниже естественной характеристики, при этом скорость вращения якоря замедляется, ω → 0. На рисунке 13 представлена схема подключения машины постоянного тока с последовательной обмоткой возбуждения к управляемому выпрямителю.

Рис. 13 Схема подключения ДПТ ПВ к управляемому выпрямителю
Механические характеристики, получаемые при регулировании напряжением питания, аналогичны характеристикам, представленным на рисунке 10.Недостаток системы, состоящей из управляемого выпрямителя и электродвигателя последовательного возбуждения, — низкий коэффициент мощности при пониженном выходном напряжении, а также наличие пульсаций напряжения, вызывающие появление бросков тока, которые ухудшают коммутацию и увеличивают потери мощности в двигателе.Понижение скорости вращения электродвигателя в результате шунтирования обмотки якоря. Способ применяется для снижения оборотов вращения ДПТ ПВ.
На рисунке 14 изображена схема подключения электродвигателя с шунтирующим обмотку якоря переменным резистором.
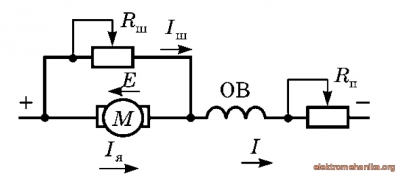
Рис. 14 Схема подключения ДПТ ПВ с шунтирующем якорь резистором
Наличие сопротивления, шунтирующего обмотку якоря Rш, позволяет при токе якоря равным нулю (Iя = 0) перевести работу электродвигателя в режим идеального холостого хода (ω = ω0).
Увеличение магнитного потока Ф за счет роста тока в Rш приводит к дополнительным потерям напряжения в пусковом резисторе Rп и значительному снижению скорости вращения электродвигателя.
Уменьшение величины шунтирующего сопротивления практически до нуля переводит работу двигателя постоянного тока с последовательной обмоткой возбуждения в генераторный режим (рис. 15).
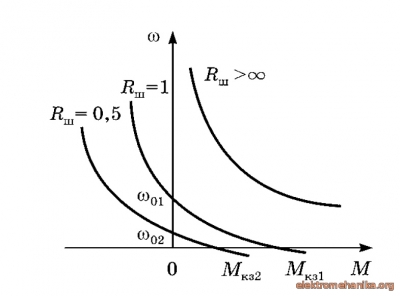
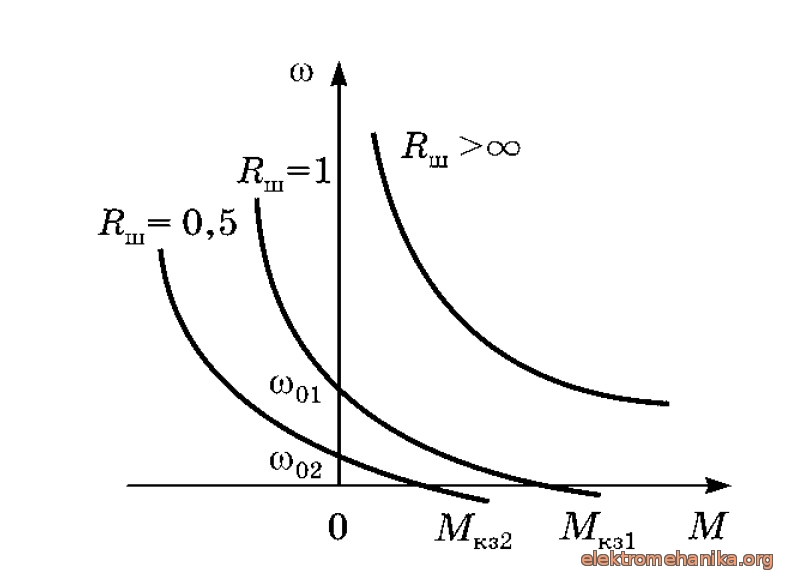
Рис. 15 Механические характеристики ДПТ ПВ с шунтирующим якорь резистором
Когда ЭДС якоря становится равной падению напряжения на шунтирующем сопротивлении (Rш = 1), электродвигатель переходит в режим работы идеального холостого хода, ω01. Дальнейшее уменьшение шунтирующего сопротивления сдвигает искусственную механическую характеристику влево от оси ординат (Rш = 0,5). Сдвиг происходит за счет увеличения тока и, как следствие, магнитного потока в Rш. В результате появления тормозного момента работа электродвигателя переходит на пониженные обороты вращения.
Перевод электродвигателя на искусственные механические характеристики в двигательном режиме работы снижает пусковой момент (момент короткого замыкания) и уменьшает крутизну кривых, поэтому торможение противовключением неприменимо, так как возникает большой тормозной момент.
Увеличение последовательного сопротивления Rп ведет к уменьшению напряжения, приложенного к двигателю, и снижению скорости вращения.
Приводные характеристики двигателя постоянного тока смешанного возбуждения
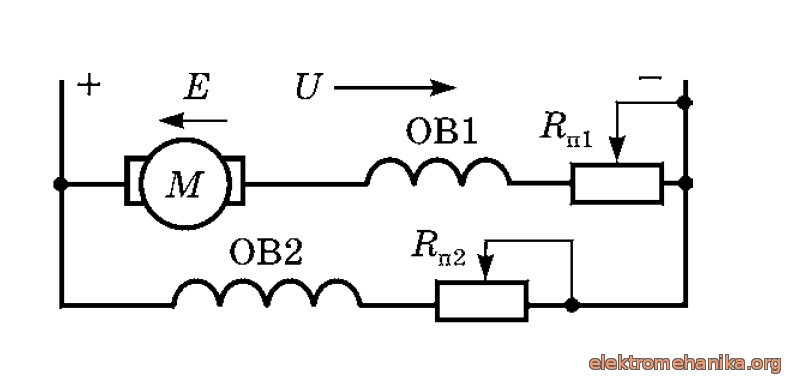
Электродвигатель постоянного тока комбинированного исполнения конструктивно состоит из якоря и двух обмоток возбуждения, одна из которых подключена последовательно, а другая параллельно. На рисунке 16 дана схема подключения рассматриваемой машины.
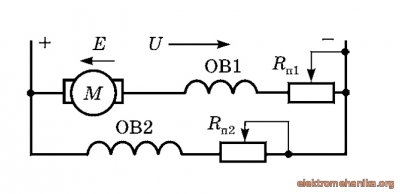
Рис. 16 Схема подключения двигателя постоянного тока смешанного возбуждения
Наличие двух обмоток возбуждения ОВ1 и ОВ2 приводит к тому, что механические характеристики двигателя постоянного тока смешанного возбуждения (ДПТ СВ) занимают промежуточное положение между характеристиками электродвигателей параллельного и последовательного возбуждения. Электропривод на основе ДПТ СВ может работать в двигательном и генераторном режимах, а также в режиме противовключения.
Рост тока в последовательной обмотке возбуждения ОВ1 увеличивает магнитный поток двигателя и пусковой момент и снижает обороты вращения, когда электропривод работает под нагрузкой.
Электродвигатели данного типа имеют насыщенную магнитную систему, поэтому нет строгих математических выражений, которые бы достаточно точно аналитически описывали механические и электромеханические характеристики. Поэтому приводные характеристики строятся на основе двух зависимостей — n = f(Iя) и M = f(Iя).
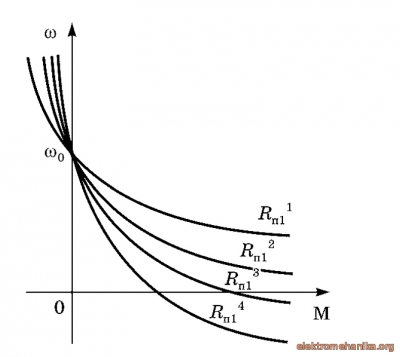
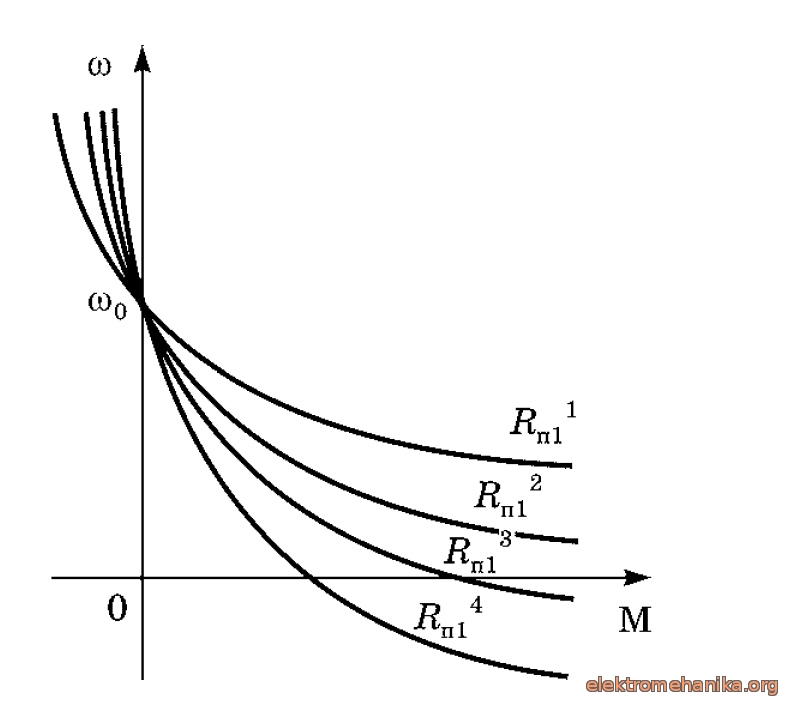
Рис. 17 Механические характеристики ДПТ СВ, Rп14 > Rп13 > Rп12 > Rп11
На рисунке 17 изображены механические характеристики ДПТ СВ. Крутизна механических характеристик зависит от электрических параметров последовательной обмотки возбуждения.
При увеличении сопротивления пускового резистора в цепи обмотки якоря скорость вращения двигателя понижается, а характеристики становятся более мягкими.
Установка подвижного контакта сопротивления Rп1 на максимальное значение переводит работу ДПТ СВ из двигательного режима в тормозной.
Наличие магнитного потока, создаваемого шунтирующей обмоткой возбуждения ОВ2, позволяет электродвигателю не только потреблять электрическую мощность из сети, но и отдавать ее обратно в сеть. Якорь, преодолевая обороты вращения, соответствующие идеальному холостому ходу, заставляет ДПТ перейти из двигательного режима в режим генераторного торможения. При работе в генераторном режиме направление тока в электрической цепи якоря меняется на противоположное. В результате действующая МДС последовательной обмотки возбуждения ОВ1 оказывает размагничивающее действие, приводящее к медленному нарастанию электромагнитного момента, поэтому искусственные механические характеристики в тормозном режиме круто поднимаются вверх. Для устранения размагничивающего действия в процессе отдачи электроэнергии в сеть у ДПТ СВ отключают последовательную обмотку возбуждения, превращая машину в генератор постоянного тока параллельного возбуждения.С целью согласованного действия обмоток возбуждения реверсирование двигателя смешанного возбуждения выполняется изменением направления тока якоря.
Регулирование координат электропривода на основе ДПТ СВ осуществляется изменением напряжения питания, магнитного потока и сопротивления добавочного резистора в цепи якоря. Двигатель обеспечивает работу во всех тормозных режимах: генераторном, противовключения и динамического торможения.
При динамическом торможении с сохранением направления вращения последовательная обмотка размагничивает машину и снижает тормозной эффект, а во время изменения направления движения наблюдается дополнительное намагничивание магнитопровода и увеличение тормозного момента.
|